
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
portfolio

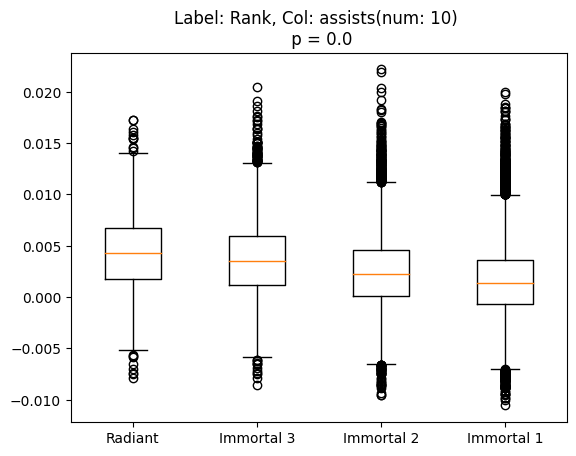
Machine Learning Library From Scratch
Implementing machine learning algorithms from scratch in Python. 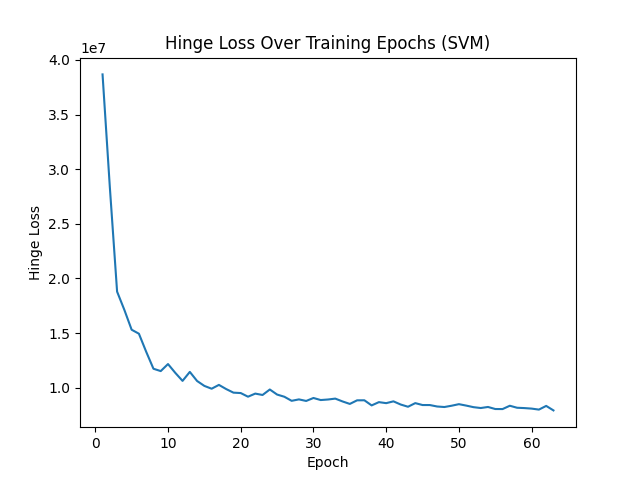
publications
Improving Upper-limb Prosthesis Usability: Cognitive Workload Measures Quantify Task Difficulty
Preprint in medRxiv, 2022
Methods to quantify cognitive workload during advanced upper-limb prosthesis usage.
Recommended citation: M. D. Paskett et al., “Improving Upper-limb Prosthesis Usability: Cognitive Workload Measures Quantify Task Difficulty,” Aug. 03, 2022.
Download Paper
Overcoming Failure: Improving Acceptance and Success of Implanted Neural Interfaces
Published in Bioelectronic Medicine, Special Issue for Neural Interfaces, 2025
Overview of the challenges of designing neural interfaces and failure modes of implanted systems
Recommended citation: A. N. Dalrymple, S. T. Jones, J. B. Fallon, R. K. Shepherd, and D. J. Weber, “Overcoming failure: improving acceptance and success of implanted neural interfaces,” Bioelectron Med, vol. 11, no. 1, p. 6, Mar. 2025.
Download Paper
Comparative Analysis of Temporal-Difference Learning Methods to Learn General Value Functions of Lower-Limb Signals
Published in IEEE International Consortium for Rehabilitation Robotics (ICORR), 2025
Comparing different temporal-difference learning methods to learning general value functions of gait related signals.
Recommended citation: S. T. Jones, G. M. Simpson, W. M. J. Young, K. North, P. M. Pilarski and A. N. Dalrymple, "Comparative Analysis of Temporal Difference Learning Methods to Learn General Value Functions of Lower-Limb Signals," 2025 International Conference On Rehabilitation Robotics (ICORR), Chicago, IL, USA, 2025, pp. 1209-1214, doi: 10.1109/ICORR66766.2025.11063114.
Download Paper
A Novel Template-Matching Method for Extracting Gait Cycles from Underfoot Pressure Data
Published in IEEE International Consortium for Rehabilitation Robotics (ICORR), 2025
Extracting gait cycles using a template-meatching method.
Recommended citation: G. M. Simpson, K. North, S. T. Jones and A. N. Dalrymple, "A Novel Template-Matching Method for Extracting Gait Cycles from Underfoot Pressure Data," 2025 International Conference On Rehabilitation Robotics (ICORR), Chicago, IL, USA, 2025, pp. 1787-1792, doi: 10.1109/ICORR66766.2025.11063134.
Download Paper
Hierarchical Reinforcement Learning Framework for Adaptive Walking Control Using General Value Functions of Lower-Limb Sensor Signals
Accepted to Multi-Disciplinary Conference on Reinforcement Learning and Decision Making Conference (RLDM), 2025
Using learned preditions of future signal behavior to classify walking terrains.
Recommended citation: S. T. Jones, G. M. Simpson, P. M. Pilarski, and A. N. Dalrymple, “Hierarchical reinforcement learning framework for adaptive walking control using general value functions of lower-limb sensor signals,” arXiv preprint arXiv:2507.16983, 2025. [Online]. Available: https://arxiv.org/abs/2507.16983
Download Paper
Personalized Gait Rehabilitation with Spinal Cord Stimulation and Machine Learning: Recent Advances and Promising Applications
Published in Current Opinions in Biomedical Engineering: Bioelectronic Medicine, 2025
Review of spinal cord stimuation and machine learning techinques to facilitate personalized gait rehabilitation.
Recommended citation: K. North, S. T. Jones, G. M. Simpson, and A. N. Dalrymple, “Personalized gait rehabilitation with spinal cord stimulation and machine learning: Recent advances and promising applications,” Current Opinion in Biomedical Engineering, vol. 34, p. 100579, Jun. 2025.
Download Paper
talks

teaching
Teaching experience 1
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Teaching experience 2
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.